Anyone who has steered a boat has experienced the effort needed to keep the boat on course when currents are pushing it in a different direction. Now, MIT researchers have developed sensors that can measure the pressure of flows around an ocean-going vessel so that it can utilize rather than fight those flows, saving energy and improving maneuverability. Other work aims to go a step further: to change flows from patterns that impede progress to patterns that will help.
Flows around autonomous underwater vehicles (AUVs) and other vessels – from ships to submarines – can significantly affect their performance. For example, when a vessel going 20 mph turns sharply, it pushes into the current on one side and creates swirling eddies on the other; as a result, its speed can suddenly drop to 7 mph. The behavior of control surfaces such as rudders and propellers can also be affected. A propeller operating in waves, for instance, can experience cavitation, a phenomenon in which vapor layers form around the blades, impeding performance. Preventing such phenomena could mean smoother, more energy-efficient operation. Indeed, ocean-going vessels are now responsible for 8.6% of the world’s total annual oil consumption, so even a small increase in efficiency could mean significant energy savings.
Natural sea creatures do not experience such problems because they have special organs that enable them to sense their environment. In many fish, dark-colored “lateral lines” running down their sides and around their heads contain hundreds of tiny pressure and velocity sensors that perceive every minute change in the water flowing by, enabling the fish to turn or take other appropriate action. The effect can be astonishing. The Mexican cavefish, for example, lives in absolute darkness. As a result, it has no eyes and must navigate using only its lateral lines. In an experimental setting, a cavefish can dart among obstacles, moving quickly along their edges and ducking through openings between them.
“We want to design sensors for our vessels that can do exactly what the lateral lines do for fish,” says Michael Triantafyllou, the William I. Koch Professor of Marine Technology and professor of mechanical and ocean engineering. “But while we get ideas from fish, we needn’t use exactly the same design that they do.” In fish, the lateral lines are made up of systems of fluid-filled canals containing tiny hairs that monitor flows and send messages directly to the fish’s brain.
“This is an organ we don’t have, so we have no idea of how it really works; but it’s good because it’s simple and doesn’t require the intense computation that vision requires, for example,” says Triantafyllou. The engineered version should likewise generate “simple signals so that – without using a huge computer – we know immediately what’s going on and can take action.”
To design and fabricate his pressure sensors, Triantafyllou turned to the MIT Microsystems Technology Laboratories (MTL). There, experts make various types of inexpensive, high-performance sensors based on microelectromechanical systems (MEMS) – the technology of small mechanical devices driven by electricity. Led by Jeffrey Lang, professor of electrical engineering, an MTL team designed arrays of pressure sensors, each of which is a 2-mm-wide cavity covered by a 20-micron-thick silicon membrane that bends in response to pressure. A metal strain gauge on the surface of each membrane senses that deflection and generates a signal that indicates pressure. Electronic systems amplify and integrate the signals from all the sensors, producing pressure information that can be continuously displayed online.
In tests on small vessels and propellers, the sensor arrays proved robust and even more sensitive than expected. In one set of experiments, Triantafyllou and his colleagues in the Center for Ocean Engineering equipped a small vessel with sensors in locations that mimic where they are on fish (see the schematics above). They also installed commercially available sensors that would generate reliable measurements for comparison and guidance. Then they performed experiments in the 108-foot-long MIT Towing Tank, a test facility equipped with a wave generator.
In those experiments, they simulated a commonly occurring situation: A vessel is traveling straight ahead, but the oncoming current is approaching at an angle, so the vessel must exert energy to offset that force. A more energy-efficient approach would be to head straight into the current as long as possible and then turn, much as a sailboat tacks in the wind. Pressure measurements could guide the execution of such an energy-saving maneuver.
To replicate that situation, the researchers propelled their vessel directly into oncoming flows from the wave generator and then at a gradually increasing angle. The graph below shows pressure measurements from the sensor at the nose of the boat (the zero point) and from the sensors down each side. The black curve displays results when the vessel is heading straight into the current. Pressure is highest at the nose and lower at the sides, with the side readings symmetrical left and right. The purple line shows results when the boat is 12 degrees off the center, and therefore subject to the force of a side current. The pressure at the nose is the same, but readings on the left and right sides are no longer symmetrical. As the angle increases, that asymmetry increases dramatically. The low pressure on one side and high on the other creates a drag force that must be overcome – a significant waste of energy.
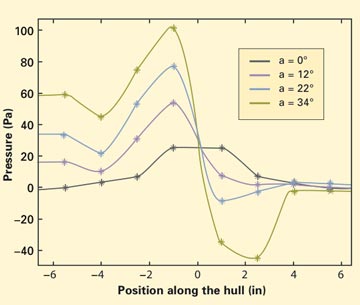
“The effect is very detectable,” says Triantafyllou. “These sharp pressure signals can guide us as we develop techniques to navigate and maneuver more efficiently.”
Other work aims to detect eddies, swirling fluid structures that can also profoundly affect navigation. Again, fish use their lateral lines to identify eddies – and then take advantage of them. In one video, a trout swims in a tank as eddies come toward it from first one side and then the other. The trout senses the eddies and then uses their suction force to stay in one place without swimming, thereby expending little energy.
To test their ability to identify eddies, the researchers again used the MIT Towing Tank. For these tests, they seeded the water with small particles and shone a laser beam from below so as to observe the patterns of flow without disturbing them. Four sensors measured pressure as hand-generated eddies swirled through the tank. Based on the pressure signals, a flow model estimated the position and strength of the eddies. The model accurately tracked the behavior of the eddies within the tank.
Triantafyllou and his team are now developing methods of controlling flows that interfere with propulsion and maneuverability. In one project, they designed a torpedo-shaped submersible vehicle that has pressure sensors plus two small rotating cylinders running down its sides. When the submersible heads at an angle into the oncoming flow, the pressure sensors detect the formation of eddies and start the small cylinders spinning. The cylinders spin in opposite directions, creating suction that immediately prevents eddies from forming.
The team is also looking at another possible animal model: the whisker of a seal. This organ has a remarkable ability to sense the velocities of flows. In experiments, a blindfolded harbor seal can detect the passage of a fish by using its whiskers to sense changes in flow velocity – even 30 seconds after its prey has passed by.
The researchers recently acquired whiskers shed by seals at the New England Aquarium. They have now developed large-scale models of these elaborate, undulating structures and are developing computer simulations of how they behave. “We’re trying to understand why these whiskers work so well,” says Triantafyllou. “Once again, we hope to emulate the ability of sea-going creatures to sense flows around them – a prerequisite to developing ways to make our vessels more energy efficient and maneuverable.”
This research was supported by the Center for Environmental Sensing and Modeling of the Singapore-MIT Alliance for Research and Technology and by the MIT Sea Grant College Program. More information can be found in:
H. Choi, C. Tan, S. Yang, V. Fernandez, J. Miao, M. Triantafyllou, and G. Barbastathis. Pressure and Velocity MEMS Sensor Arrays in Autonomous Underwater Vehicle for Optimized Navigation Path. International Conference on Intelligent Unmanned Systems (ICIUS-2010), Bali, Indonesia, November 4–5, 2010.
V. Fernandez, S. Hou, F. Hover, J. Lang, and M. Triantafyllou. “Development and application of distributed MEMS pressure sensor array for AUV object avoidance.” Proceedings, Unmanned Untethered Submersible Technology Symposium, Durham, NH, August 23–26, 2009.
V. Fernandez, S. Hou, F. Hover, J. Lang, and M. Triantafyllou. “Lateral-line inspired MEMS- array pressure sensing for passive under- water navigation.” Proceedings, Unmanned Untethered Submersible Technology Symposium, Durham, NH, August 19–22, 2007.
M. Triantafyllou. Science and Technology Challenges and Potential Game Changing Opportunities. Paper prepared for the Committee on Naval Engineering in the 21st Century, Transportation Research Board, National Academy of Sciences, May 2010.
This article first appeared in the Spring 2011 issue of Energy Futures, the magazine of the MIT Energy Initiative.